西門子S120控制器模塊6SL3210-1SE31-1AA0價格優勢 西門子S120控制器模塊6SL3210-1SE31-1AA0價格優勢
潯之漫智控技術(上海)有限公司 上海詩慕自動化設備有限公司
本公司銷售西門子自動化產品,*,質量保證,價格優勢
西門子PLC,西門子觸摸屏,西門子數控系統,西門子軟啟動,西門子以太網
西門子電機,西門子變頻器,西門子直流調速器,西門子電線電纜
我公司大量現貨供應,價格優勢,*,德國*
SIMATIC TDC的高速循環周期使得TDC能夠在以下的應用領域發揮優勢
SIMATIC TDC的小循環周期為0.1ms
對于傳動的閉環控制(轉矩、轉速、位置、角度/角差、速度),特別是如果對多個驅動器進行協調或者驅動器之間存在著復雜的關系
用于調節多個/不同的物理變量(例如張力,壓力)
用于計算若干過程/設備變量(例如:溫度)
SIMATIC TDC有助于縮短計算周期(100微秒),具有功能性儲備和突出的靈活性。
SIMATIC TDC的應用示例包括:
金屬生產,金屬加工和金屬機加工,冷軋、熱軋、高速帶線材、高速棒材、拉矯平整等,例如:自動輥縫控制、飛剪、開卷卷取、小車定位
用于遠距離高壓直流輸電、智能電網、柔直風電場接入,例如:晶閘管或者IGBT通斷控制
用于穩定電力傳輸的無功功率補償,例如:電容器單元,電容器組
由于具有高的計算能力因而提高了產能和競爭力
由于降低了組件密度并簡化了備件儲備而降低了采購成本
由于使用了通用的標準工具和重復使用現有軟件而降低了工程組態成本
使用 標準
SIMATIC TDC 包括了一個或多個機架,機架上可以插入所需的模塊。多處理器運行使性能幾乎可以無限擴展。
使用可擴縮硬件的模塊式系統結構
實時操作系統小采樣循環周期100us
由于具有 64 位構架的 CPU,能夠實現高的性能
每個機架多可以配備 20 個 CPU 進行同步多處理
由于使用了 VME 總線系統可以在 CPU 之間實現*的通訊性能
同步耦合多 44 個機架
使用 STEP 7 工程組態工具實現了圖形組態連續功能圖(CFC)和順序功能圖 SFC(順序功能圖)
C語言,功能塊生成器
SIMATIC TDC 是一款模塊式多處理器系統,由一個或多個機架構成。機架配備有 CPU、I/O 模塊和通訊模塊
UR5213 機架
電磁屏蔽 19" 的 UR5213 機架允許具有大能力儲備的硬件的可擴縮式的擴展。適合于安裝在墻上和機柜安裝,帶有一個集成電源,電源帶有有源冷卻和內部監視裝置。通過插入多 20 個 CPU 或者把多 44 個機架連接起來以提高性能。
中央處理單元 CPU551
中央處理單元 CPU551 適用于具有非常高的計算要求的開環和閉環控制任務。CPU 根據可調的掃描間隔可以確保實現嚴格的循環處理。
西門子6SL3210-1SE21-0AA0
I/O 模塊 SM 500
SM500 I/O 模塊可以為連接數字和模擬 I/O提供豐富的選件。此外,還可以連接增量位置編碼器和值編碼器。
CP50M1、CP51M1通訊模塊
CP50M0 和 CP51M1 通訊模塊可以為試運行、過程控制和 HMI 提供高性能的通訊。它們可以處理 MPI、PROFIBUS DP 協議,以及使用 TCP/IP 和/或 UDP 協議的以太網。
全局數據存儲器 GDM
通過全局數據存儲器(GDM),一系列帶有 CP52x0 的機架可以相互通訊,能夠擴展出幾乎無限的計算能力。通過光纜和共享存儲器多有 44 個機架可以互聯。除了機架間的通訊,GDM 還可以實現同步(掃描時間、時鐘時間)和報警功能。更新時間設置為 < 1 ms。
框架連接模塊 CP53M0
CP53M0 框架連接模塊可以提供以下功能:
把 SIMATIC TDC 系統耦合到 SIMADYN
D 系統
把 SIMATIC TDC 系統耦合到另外兩個 SIMATIC TDC 機架上
用于 CPU 模塊與機架間數據交換通訊緩沖器
1. 概述
西門子驅動裝置(SIMOVERT MasterDrives VC,MicroMaster 4 以及SIMOREG DC Master)除了具有與驅動基本應用有關的功能外,還具有強大的通訊功能。驅動通訊可以分為三種方式:
? PROFIBUS DP協議
? USS協議
? SIMOLINK協議(一般用來代替Peer to Peer協議,實現從站到從站的通訊)
PROFIBUS DP和USS協議屬于主/從通訊,需要有PLC作為主站,驅動裝置作為從站。
USS協議的主要優點是,其接口集成在基本裝置中,不需要額外費用;主要缺點是通訊速度慢,只有基本通訊功能(PKW+PZD),多31個從站。
PROFIBUS DP協議的主要優點是,通訊速度快,除了基本功能之外還有一些附加功能(例如:非循環通訊,交叉通訊),站點數更多;主要缺點是需要另外購買作為選件的通訊模板(例如:CBP2或PROFIBUS模板)。
SIMOLINK協議(代替Peer to Peer協議)主要用來實現驅動裝置與驅動裝置之間的通訊。SIMOLINK協議也可以是主/從通訊,主站是S7-400(FM458+EXM448)或SIMADYN D。
這里我們主要介紹S7 PLC與驅動裝置采用PROFIBUS DP協議進行通訊。
采用PROFIBUS DP協議通訊時,既可以利用STEP 7本身提供的功能,也可以使用TIA軟件Drive ES。
本文檔只介紹STEP 7本身提供的功能。有關Drive ES的功能將根據需要在以后的文檔中再做介紹。
(關于 DriveES,可以參加西門子自動化與驅動培訓中心的培訓課程D2403)
2. *條件
下面以S7-300 PLC與MasterDrives CUVC變頻器的通訊為例:
主站:S7-300 CPU315-2DP可編程序控制器
從站:MasterDrives CUVC變頻器 + CBP2 通訊模板
編程裝置:PC + STEP 7 V5.4 + MPI接口(MPI Adapter 或CP5611卡)
裝有STEP 7 V5.4 的PC機用于S7 CPU315-2DP的硬件組態與編程,通過MPI電纜與CPU315-2DP的MPI接口連接,用于硬件組態數據及程序的下載。CPU315-2DP的DP接口通過PROBIBUS 電纜與CUVC 變頻器的CBP2 上的DP 接口連接,用于S7-300 與變頻器的通訊。
網絡連接如圖1 所示。

圖1:PC機、CPU315-2DP 與驅動裝置的連接
3. 硬件組態
3.1. 新建項目
在SIMATIC Manager 中新建一個項目,名稱為Drives_Comm。如圖2 所示。
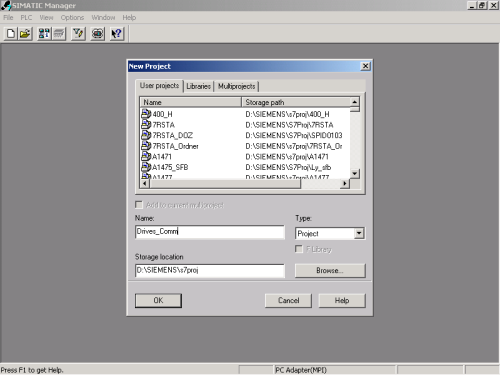
圖2:新建項目,名稱為Drives_Comm
3.2. 插入一個S7-300 主站
在項目名稱Drives_Comm 下插入SIMATIC 300 Station,如圖3 所示。
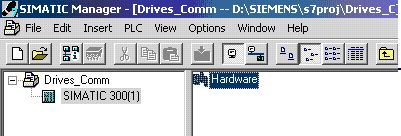
圖3:在項目下插入一個S7-300 站
接下來對該站進行硬件組態:從硬件組態目錄中依次插入機架、電源、CPU,設置CPU上PROFIBUS DP 接口的網絡參數(可采用缺省設置,即:地址2,高地址126,波特率1.5 Mbps,協議DP)。如圖4 所示。
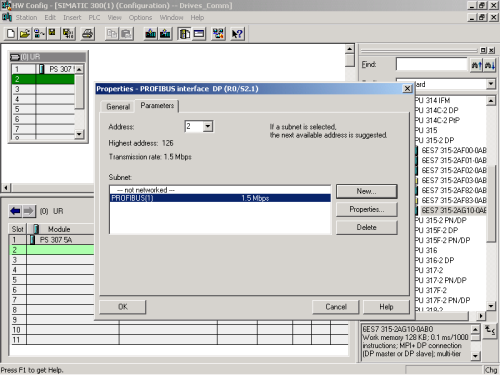
圖4:設置CPU 上PROFIBUS DP 接口的參數
按OK 鍵確認后得到主站的組態結果,如圖5所示。
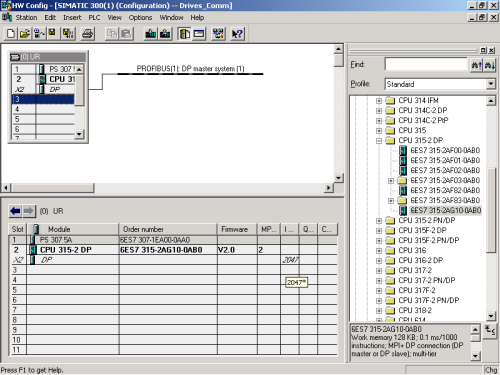
圖5:主站的組態
3.3 插入一個MASTERDRIVE 從站
在PROFIBUS(1): DP master system (1) 總線上掛上MasterDrives 從站。
從站路徑為:PROFIBUS DP >
SIMOVERT >
MASTERDRIVES/DC MASTER CBPx 或
MASTERDRIVES/DC MASTER CBP2 DPV1
MASTERDRIVES/DC MASTER CBPx 與MASTERDRIVES/DC MASTER CBP2 DPV1 的區別是,前者只能按照PPO 類型選擇報文結構(即CBP 功能:循環通訊),后者還能選擇更多的報文結構,以配合CBP2 的一些擴展功能(DPV1功能)。
(關于CBP2 模板的報文結構參見下面第7 部分)
(關于MM4 PROFIBUS 模板的報文結構參見下面第8 部分)
選擇MASTERDRIVES/DC MASTER CBP2 DPV1 作為從站,地址設成3。如圖6 所示。
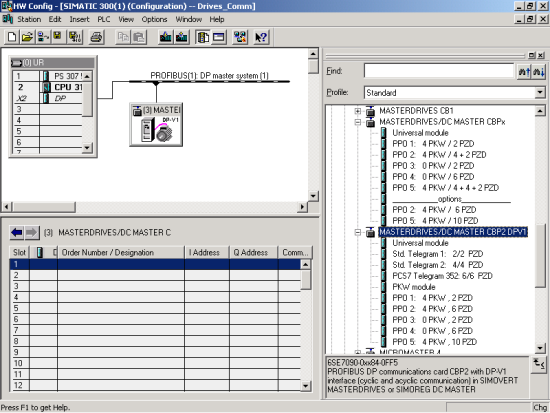
圖6:選擇MASTERDRIVES/DC MASTER CBP2 DPV1 作為3 號站
3.4. 在從站中插入“模板”
在驅動裝置從站中插入類似于ET 200M 從站中的模板,以確定報文結構。
將右邊窗口硬件目錄中MASTERDRIVES/DC MASTER CBP2 DPV1 下面的 PPO 3: 0PKW, 2PZD插入左下窗口中的*行(Slot 1)。該選項共占兩行。意思是:PPO類型3,即:0個字參數數據(又叫PKW),2 個字過程數據(又叫PZD)。參數數據用于PLC 讀/寫變頻器的參數,過程數據用于PLC 控制和監視生產過程。0 個字參數數據表示PLC 不能讀/寫驅動裝置的參數,參數數據也不占用S7 的外設地址;2 個字過程數據表示PLC 和驅動裝置交換2 個字過程數據,各占用S7-300 PLC 四個字節的外設地址。地址范圍是輸入字節256 - 259,輸出字節256 -259。如圖7 所示。
通常S7 傳送到驅動裝置的第1 個字是控制字,第2 個字是頻率設定值;驅動裝置傳送到S7的第1 個字是狀態字,第2 個字是頻率實際值。這是簡單的應用。
(關于CBP2 模板的其他選項的含義參見下面第7 部分)
(關于MM4 PROFIBUS 模板選項的含義參見下面第8 部分)

圖7:驅動裝置的輸入/輸出地址
3.5 查看從站中“模板”的屬性
雙擊左下窗口中的第二行(Slot 2),打開其屬性。如圖8 所示。
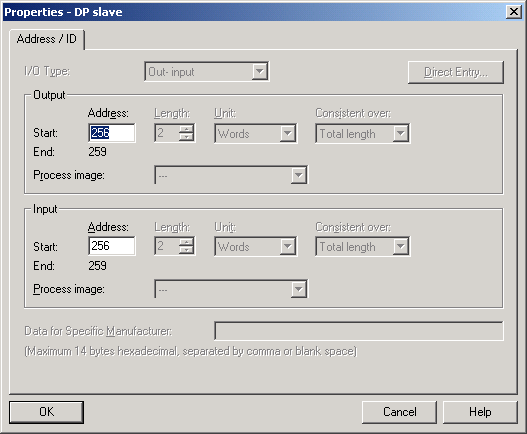
圖8:驅動裝置的輸入/輸出地址的屬性
屬性中給出驅動裝置占用S7-300 PLC 外設地址的情況,包括:輸出/輸入地址,長度,單位,連續性范圍。這里除了地址之外,其他屬性都是由PPO3 決定的,只能讀,不能改寫。
| 提示: | ||||||
| 長度: | MASTERDRIVES/DC MASTER: | 大 16 個字 | ||||
| MICROMASTER 420: | 大 4 個字 | |||||
| MICROMASTER 430/440: | 大 8 個字 | |||||
| 單位: | Words(字) | |||||
| 連續性范圍: | Unit | 以字為單位傳送 | ||||
| Total length | 所有字一起傳送 | |||||
當字長不大于 2 或選擇“以字為單位傳送”時:用 MOVE 指令(L/T 指令)編程
當字長大于 2 且選擇“所有字一起傳送”時:用 SFC14/15 編程
4. 編程
根據前面的組態,由于輸入/輸出各占四個字節,可以使用兩次MOVE 指令(L/T 指令)。由于程序簡單,程序可以直接編寫在OB1 中。數據從MB0 - MB3(即:MW0和MW2)寫入驅動裝置,從驅動裝置讀回的數據放入MB4 - MB7(即:MW4和MW6)。如圖9所示。
