西門子SMARTS7-200模塊CPUST30 西門子SMARTS7-200模塊CPUST30

潯之漫智控技術(上海)有限公司 上海詩慕自動化設備有限公司
本公司銷售西門子自動化產(chǎn)品,*,質(zhì)量保證,價格優(yōu)勢
西門子PLC,西門子觸摸屏,西門子數(shù)控系統(tǒng),西門子軟啟動,西門子以太網(wǎng)
西門子電機,西門子變頻器,西門子直流調(diào)速器,西門子電線電纜
我公司大量現(xiàn)貨供應,價格優(yōu)勢,*,德國*
S7-200 SMART PLC 將微處理器、集成電源、輸入和輸出電路、運動控制、RS-485 通訊口以及以太網(wǎng)通訊口組合到一個設計緊湊的外殼中形成了功能強大的控制器。S7-200 SMART PLC 集成的 RS-485 口支持 PPI、modbus RTU 、USS 等通訊協(xié)議,擴展 SB CM01 RS485/232 通信板可以使用 RS-485 或 RS-232 連接方式。
SIMATIC RF200R 系列是一種緊湊型低成本讀寫裝置,尤其適合在工業(yè)小型裝配線和內(nèi)部物流系統(tǒng)中使用。通過 RF200R 極為經(jīng)濟有效地實現(xiàn) HF 范圍(13.56 MHz,ISO 15693)內(nèi)的中等性能識別任務。RF200R 讀寫裝置可與 MOBY D 產(chǎn)品系列 (MDS Dxxx) 中的 ISO 數(shù)據(jù)載體一起使用。
S7-200 SMART PLC 使用 SB CM01 RS485/232 通信板可與 RF200R 讀寫器通過 RS-232 連接方式,采用 RFID_smart_library 指令庫實現(xiàn)與 RF200R 進行通信來實現(xiàn)對數(shù)據(jù)載體的讀寫。
本文以 ST40 CPU 和 RF260R 為例,具體講解了S7-200 SMART PLC 采用 RFID_smart_library 指令庫實現(xiàn)與 RF260R 的編程和調(diào)試過程。
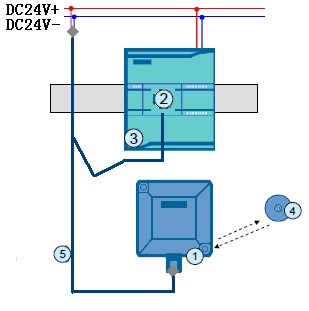
圖01. S7-200 SMART 與RF260R 設備的基本連接 1. RF260R讀寫器
2. SB CM01 RS485/232 通信板
3. S7-200 SMART PLC
4. MDS DXX數(shù)據(jù)載體
5. 電源末端開路的RS-232連接電纜
1. 概述
在現(xiàn)場應用中,很多儀表和設備僅支持Modbus RTU的通訊協(xié)議,第三方儀表可以做Modbus主站或從站,西門子的通訊模塊CP341 / CP441-2 通過Dongle(硬件狗)可以擴展該協(xié)議,S7-200 集成的口可以支持自由口通訊,通過指令庫也可以方便的實現(xiàn)Modbus RTU通訊。本文以S7-200作為Modbus 主站,CP341作為Modbus 從站,實現(xiàn)Modbus RTU通訊,闡述兩者在通訊方面的設置和注意事項。
2. 軟件環(huán)境
2.1 STEP7 V5.4 SP4
用于編寫 S7-300/400程序,此軟件需要從西門子購買,本文檔中的300的程序是使用Step7 V5.4 SP4的軟件編寫。
SINAMICS V90是西門子推出的一款小型、高效便捷的伺服系統(tǒng)。它作為 SINAMICS 驅(qū)動系列家族的新成員,與SIMOTICS S-1FL6 伺服電機完美結合,組成 的伺服驅(qū)動系統(tǒng),實現(xiàn)位置控制、速度控制和扭矩控制。通過優(yōu)化的設計,SINAMICS V90 確保了的伺服控制性能,經(jīng)濟實用、穩(wěn)定可靠,能用于貼標機、包裝機、壓邊機等等伺服控制系統(tǒng)。 ......
SINAMICS V90是西門子推出的一款小型、高效便捷的伺服系統(tǒng)。它作為 SINAMICS 驅(qū)動系列家族的新成員,與SIMOTICS S-1FL6 伺服電機完美結合,組成 的伺服驅(qū)動系統(tǒng),實現(xiàn)位置控制、速度控制和扭矩控制。通過優(yōu)化的設計,SINAMICS V90 確保了的伺服控制性能,經(jīng)濟實用、穩(wěn)定可靠,能用于貼標機、包裝機、壓邊機等等伺服控制系統(tǒng)。
SINAMICS V90可以與西門子小型PLC S7-200 SMART配合使用。S7-200 SMART ST40、ST60 CPU通過脈沖輸出+方向信號控制SINAMICS V90實現(xiàn)位置控制,其特點在于CPU 本體集成的三個高速輸出點(Q0.0、Q0.1、Q0.3)可通過 Micro/Win SMART 軟件中的運動控制向?qū)Х奖愕慕M態(tài)為脈沖輸出+方向信號控制通道,可多連接3個V90實現(xiàn)定位控制。
附件文檔中介紹了S7-200 SMART控制V90實現(xiàn)位置控制的具體實現(xiàn)方法,主要包含以下內(nèi)容:
1 SINAMICS V90簡介
2 V90的外部脈沖位置控制(PTI)介紹
2.1控制模式選擇
2.2數(shù)字量輸入/輸出功能
2.3脈沖輸入通道
2.4脈沖輸入形式
2.5電子齒輪比設置
3 S7-200 SMART開環(huán)運動控制介紹
3.1 概述
3.2 運動控制功能
3.3 運動控制指令
4 S7-200 SMART與V90實現(xiàn)位置控制項目配置
4.1使用的軟硬件列表
4.2 S7-200 SMART與V90的接線
4.3 PTI模式下V90參數(shù)設置
4.3.1配置伺服電機型號
4.3.2 V90的 PTI模式參數(shù)設置
4.4 S7-200 SMATR設置
4.4.1使用向?qū)ЫM態(tài)S7-200 SMATR運動控制功能
4.4.2使用運動控制面板測試軸的運行狀態(tài)
4.4.3將運動控制指令插入用戶程序
4.4.4模擬運行
5 參考資料
